Como avaliar a sensibilidade da câmera
Comparação do desempenho da câmera utilizando o padrão de desempenho de imagem EMVA1288
Conteúdo:
- Introdução às medições de desempenho de imagem com base em EMVA1288
- Definição das várias medições e como são realizadas
- Comparando o desempenho de câmeras com pouca luz em diferentes tempos de exposição
- Comparando um CCD tradicional com um sensor CMOS moderno
- Comparando gerações de sensores Sony Pregius
- Conclusão
É fácil comparar as especificações básicas da câmera, como taxa de quadros, resolução e interface; use nosso novo seletor de câmera para filtrar e classificar mais de 14 especificações EMVA para encontrar a correspondência exata para os requisitos do seu projeto. No entanto, comparar o desempenho de imagem de câmeras como eficiência quântica, ruído escuro temporal e capacidade de saturação tende a ser um pouco mais complicado. Primeiro, precisamos entender o que essas várias medições realmente significam.
O que é a eficiência quântica? Ela é medida no pico ou em um comprimento de onda específico? Qual é a diferença entre razão sinal-ruído e faixa dinâmica? Este artigo técnico abordará essas questões e explicará como comparar e selecionar câmeras com base nos dados de desempenho de geração de imagens seguindo o padrão EMVA1288.
O EMVA1288 é um padrão que define quais aspectos do desempenho da câmera devem ser medidos, como medi-los e como apresentar os resultados em um método unificado. A primeira seção do artigo técnico ajudará a entender os vários aspectos do desempenho da imagem de um sensor de imagem. delinenado os conceitos básicos que são importantes para entender ao considerarmos como um sensor de imagem converte a luz em uma imagem digital e, finalmente, definindo o desempenho do sensor. A Figura 1 apresenta um único pixel e destaca esses conceitos.
![]()
Figura 1: Como um sensor de imagem converte a luz em uma imagem digital
Primeiro, precisamos entender o ruído inerente à própria luz. A luz consiste em partículas discretas, fótons, geradas por uma fonte de luz. Como uma fonte de luz gera fótons em momentos aleatórios, haverá ruído na intensidade percebida da luz. A física da luz afirma que o ruído observado na intensidade da luz é equivalente à raiz quadrada do número de fótons gerados pela fonte de luz. Esse tipo de ruído é chamado de ruído de corrente.
Deve-se notar que o número de fótons observados por um pixel dependerá dos tempos de exposição e da intensidade da luz. Este artigo considerará o número de fótons como uma combinação de tempo de exposição e intensidade de luz. Da mesma forma, o tamanho do pixel tem um efeito não linear na capacidade de coleta de luz do sensor porque ele precisa ser quadrado para determinar a área sensível à luz. Isso será discutido em mais detalhes no próximo artigo, no contexto da comparação do desempenho de duas câmeras.
O primeiro passo na digitalização da luz é converter os fótons em elétrons. Este artigo não analisa como os sensores fazem isso e, sim, apresenta a medida da eficiência da conversão. A razão de elétrons gerados durante o processo de digitalização para fótons é denominada Eficiência Quântica (QE). O sensor de exemplo na figura 1 tem QE de 50% porque 3 elétrons são gerados quando 6 fótons "caem" no sensor.
Antes de os elétrons serem digitalizados, eles são armazenados no interior do pixel, o que chamaremos de poço. O número de elétrons que podem ser armazenados no poço é chamado de Capacidade de saturação ou Profundidade do poço. Se o poço receber mais elétrons do que a capacidade de saturação, os elétrons adicionais não serão armazenados.
Uma vez que a coleta de luz é completada pelo pixel, a carga no poço é medida e esta medição é chamada de Sinal. A medição do sinal na Figura 1 é representada por um medidor com seta. O erro associado a essa medição é denominado Ruído temporal de corrente de escuro ou Ruído de leitura.
Finalmente, a escala de cinza é determinada convertendo o valor do sinal, expresso em elétrons, em um valor de pixel de unidades analógicas para digitais (ADU) de 16 bits. A razão entre o valor do sinal analógico e a escala de cinza digital é referida como Ganho e é medida em elétrons por ADU. O parâmetro de ganho, conforme definido pelo padrão EMVA1288, não deve ser confundido com o ganho do processo de conversão "analógico para digital".
Ao avaliar o desempenho da câmera, é muito comum consultar a Taxa de sinal/ruído e a Faixa dinâmica. Essas duas medidas de desempenho da câmera consideram a razão de ruído observada pela câmera versus o sinal. A diferença é que a Faixa dinâmica considera apenas o Ruído temporal de corrente de escuro, enquanto a razão sinal-ruído também inclui a soma da raiz quadrática média (RMS) do Ruído de corrente.
O limite de sensibilidade absoluta é o número de fótons necessários para se obter um sinal equivalente ao ruído observado pelo sensor. Esta é uma métrica importante porque representa a quantidade mínima de luz necessária para observar qualquer sinal significativo. Os detalhes dessa medida serão abordados com mais detalhes nos artigos a seguir.
Para ajudar a comparar sensores e câmeras com base no padrão EMVA1288, a FLIR criou um estudo abrangente do setor sobre o desempenho de imagens de mais de 70 modelos de câmeras.
| Medição | Definição | Influenciado por | Unidade |
| Ruído de corrente | Raiz quadrada do sinal | Causado pela natureza da luz | e- |
| Tamanho de pixel | Poço, tamanho do pixel… | Design do sensor | µm |
| Eficiência quântica | Porcentagem de fótons convertidos em elétrons pelo sensor em determinado comprimento de onda | Design do sensor | % |
| de ruído escuro temporal (ruído de leitura) | Ruído no sensor quando não há sinal | Design do sensor e da câmera | e- |
| Capacidade de saturação (profundidade do poço) | Quantidade de carga que um pixel pode reter | Design do sensor e da câmera | e- |
| Taxa máxima de sinal/ruído | Maior razão possível de um sinal em relação a todos os ruídos incluídos naquele sinal, inclusive ruído de corrente e ruído temporal de corrente de escuro.” | Design do sensor e da câmera | dB, bits |
| Faixa dinâmica | Razão sinal-ruído incluindo apenas ruído temporal de corrente de escuro | Design do sensor e da câmera | dB, |
| limite de sensibilidade absoluta em bits | Número de fótons necessários para ter um sinal igual ao ruído | Design do sensor e da câmera | Ƴ |
| Ganho | Parâmetro que indica o quanto uma alteração nos elétrons deve ser grande para ocorrer uma alteração nas ADUs de 16 bits (mais conhecidas como escala de cinza) | Design do sensor e da câmera | e-/ADU |
Comparando o desempenho de câmeras com pouca luz
Para o objetivo deste artigo técnico, vamos considerar aplicações como o reconhecimento de placas de veículos (LPR) ou o reconhecimento ótico de caracteres (OCR) onde a imagem monocromática é usada e a quantidade de luz que a câmera pode coletar pode ser limitada devido a curtos tempos de exposição. É bastante simples determinar a resolução, taxa de quadros e campo de visão necessários para resolver um problema de imagem, no entanto, decidir se a câmera terá desempenho de imagem suficiente pode ser mais difícil.
Esse desafio geralmente é resolvido por tentativa e erro. Vamos considerar um exemplo em que um projetista de sistemas de visão determina que uma câmera VGA com CCD de ¼'' funcionando a 30 FPS é suficiente na aplicação. Os testes iniciais podem mostrar que a câmera possui sensibilidade suficiente em tempos de exposição de 10 ms quando o objeto está parado. Veja a Figura 2 mostrando um exemplo simples com os caracteres B, 8, D e 0 que podem ser facilmente confundidos com um algoritmo de visão. A imagem esquerda superior tirada com uma câmera CCD de ¼'’ produz imagens adequadas para processamento de imagem.
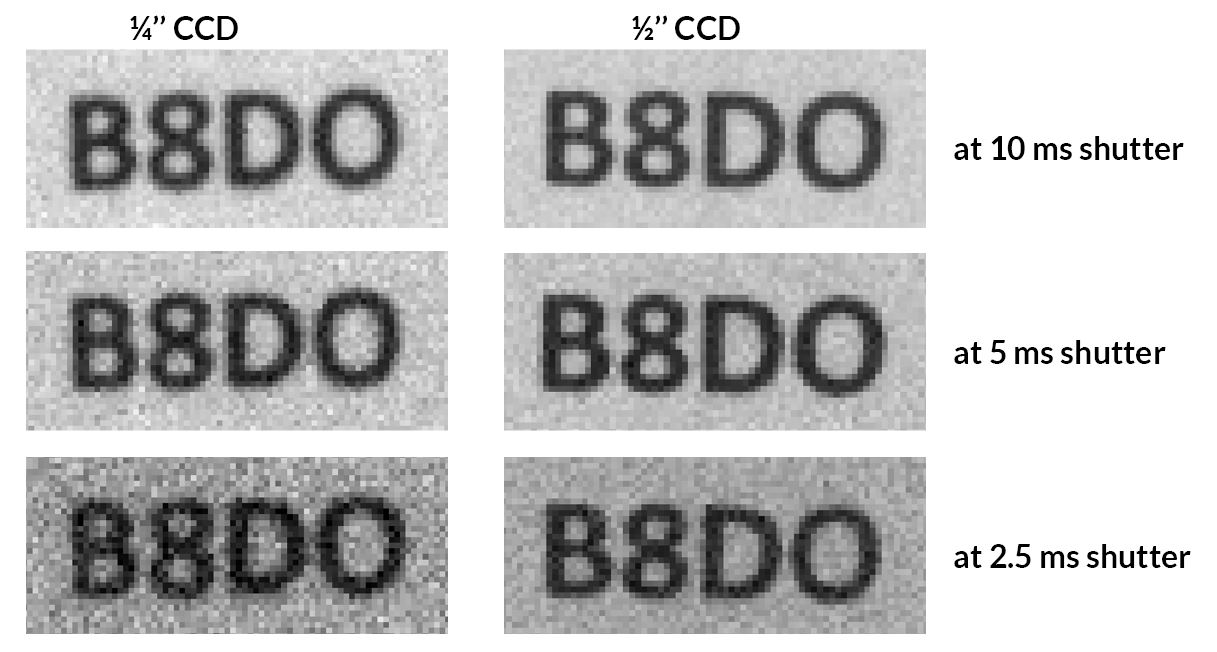
Figura 2: Resultados obtidos de câmeras CCD de 1/4'’ e 1/2'' em tempos de exposição diferentes.
No entanto, quando o objeto começa a se mover, os tempos de exposição precisam ser reduzidos e a câmera não é capaz de fornecer informações úteis porque a letra “B” e “D” não podem ser distinguidas dos números “8” e “0”. As imagens no meio e no canto inferior esquerdo da Figura 2 mostram a deterioração da qualidade da imagem. Especificamente, CCD de ¼’’ em tempo de exposição de 2,5 ms produzem imagens inadequadas para processamento de imagem.
Para os propósitos deste exemplo, a suposição é que a grande profundidade de campo não é necessária e, portanto, o número F mínimo da lente é aceitável. Em outras palavras, não é possível coletar mais luz abrindo o obturador da lente.
Então, o designer precisa considerar uma câmera diferente. A questão é se uma câmera diferente tem a chance de melhorar o desempenho do sistema. O uso de um sensor maior foi aceito como uma boa maneira de resolver problemas de baixa luminosidade, portanto, um sensor de ½'' pode ser uma boa escolha. Mas, em vez de continuar com a tentativa e erro, considerar o desempenho de imagem EMVA 1288 da câmera pode ser útil.
| Sensor de | câmera | Tamanho do pixel (μm) | Eficiência quântica (%) | Ruído temporal de corrente de escuro (e-) | Capacidade de saturação (e-) |
| Câmera de 1/4" (FL3-GE-03S1M-C) | ICX618 | 5,6 | 70 | 11,73 | 14,508 |
| Câmera de 1/2" (BFLY-PGE-03S3M-C) | ICX414 | 9,9 | 39 | 19,43 | 25,949 |
Analisando os dados do EMVA 1288, pode-se observar que o sensor de ¼'' tem melhor eficiência quântica e menor ruído, mas que o CCD ½" tem um pixel maior e maior capacidade de saturação. Este artigo mostra como determinar se a câmera com ½’’ terá melhor desempenho.
A Figura 3 compara as câmeras plotando o valor do sinal versus a densidade da luz (fótons/ µm2). O sinal como uma função da densidade da luz é determinado utilizando-se a seguinte fórmula:

Assumimos neste artigo que as lentes têm o mesmo campo de visão, o mesmo número F e as mesmas configurações de câmera.
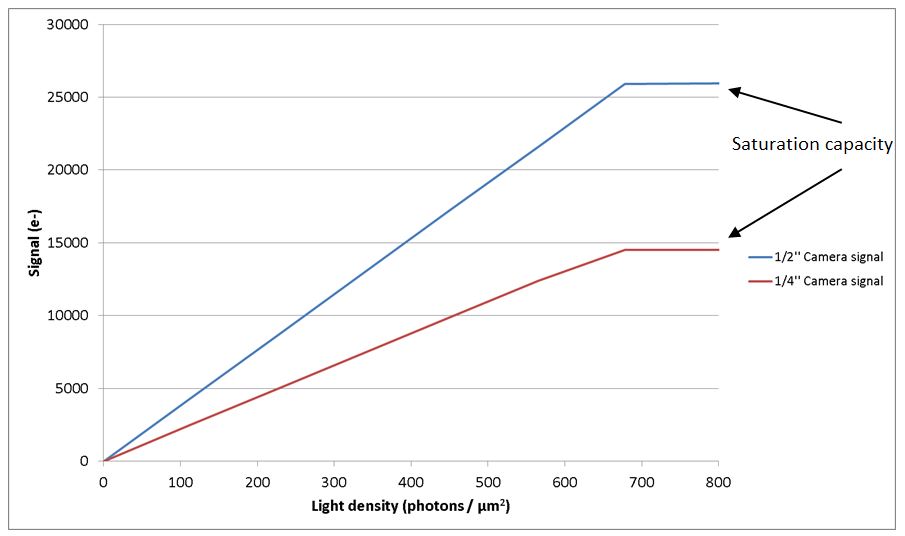
Figura 3: Sinal produzido por câmeras CCD de 1/4'' e 1/2'' em função do nível de luz.
Assine para ler mais artigos como esse
A figura mostra que, para a mesma densidade de luz, o sensor de ½'' gerará um sinal mais alto. Também pode ser observado que a saturação ocorre em um nível similar de densidade de luz de 700 fótons/μm2. No entanto, o sensor de ½'' tem capacidade de saturação significativamente maior.
Na aplicação considerada neste artigo técnico, a comparação de câmeras precisa ser feita em uma intensidade de luz baixa. Portanto, considerar os níveis de ruído torna-se particularmente importante.
A Figura 4 mostra o sinal e o ruído em intensidades de iluminação baixas. O ruído apresentado na figura é uma soma RMS de Ruído Escuro Temporal e Ruído de Tiro que foi calculado usando a seguinte fórmula:

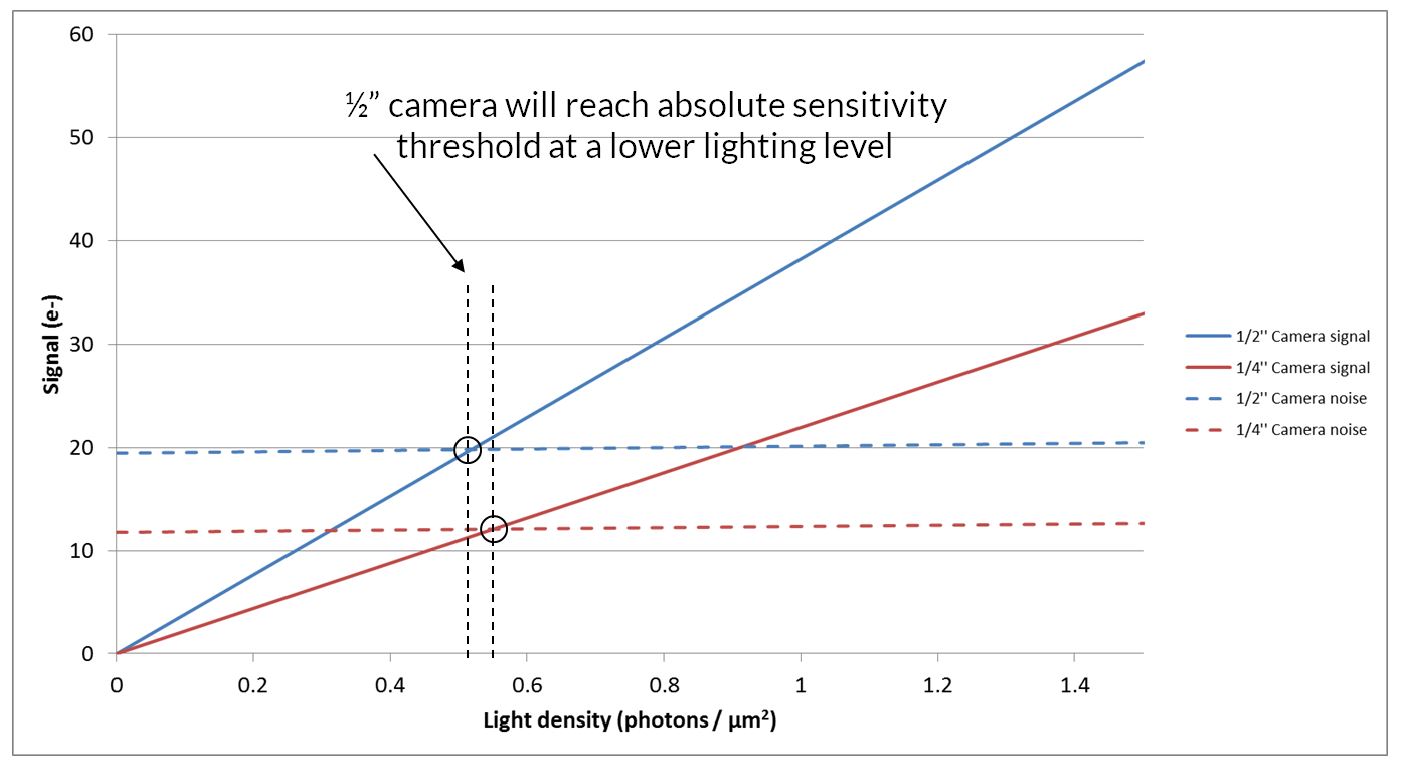
Figura 4: Sinal e ruído das câmeras CCD de 1/4'' e 1/2'' em níveis de luz baixos
O gráfico mostra que o limiar de sensibilidade absoluta (o nível de luz em que o sinal é igual ao ruído) é atingido pelo sensor de ½'' em um nível ligeiramente inferior ao do sensor de ¼''. A medida mais importante necessária para determinar qual câmera terá melhor desempenho em aplicações de pouca luz é a razão sinal-ruído (SNR).
A Figura 5 mostra a razão sinal-ruído de duas câmeras como uma função de nível de iluminação.
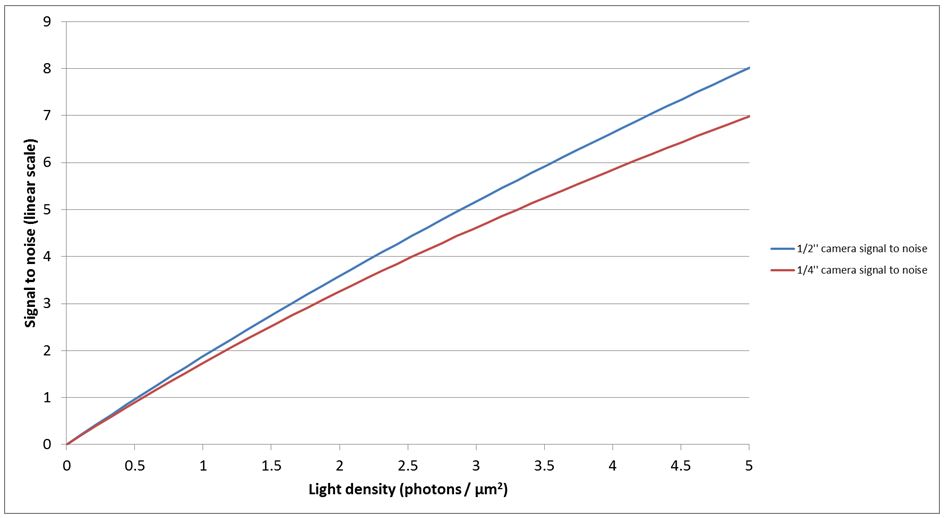
Figura 5: A taxa de sinal/ruído das câmeras CCD de 1/4'' e 1/2'' em níveis de luz baixos
Com base na taxa de sinal/ruído mais alta do sensor de ½'', a teoria sugere que as câmeras de ½'' terão desempenho melhor do que câmeras de ¼'' em níveis de luz baixos.
A partir das imagens na Figura 2, pode ser visto que, com um tempo de exposição de 2,5 ms, o sensor de ½'' preserva a forma dos caracteres em todos os tempos de exposição, enquanto o sensor de ¼'' dificulta a distinção entre os caracteres. O sensor de ½’’, portanto, tem melhor desempenho, e os resultados práticos estão alinhados com a teoria.
A FLIR realizou um extenso estudo de câmeras e publicou os resultados de desempenho de imagem do padrão EMVA 1288. Essas informações podem ser usadas para comparar o desempenho de diferentes modelos de câmeras. Embora a implementação da câmera influencie o desempenho da imagem, este estudo pode ser usado ao comparar duas câmeras quaisquer com os sensores que são abrangidos no documento.
A FLIR oferece documentos específicos de comparação de câmeras. Entre em contato pelo email mv-info@flir.com para solicitar uma comparação entre os modelos de câmera da FLIR.
Deve-se notar que o método descrito neste artigo técnico é útil para se ter uma ideia geral de quão bem uma câmera irá funcionar em comparação com outra. Esse método não pode ser usado para melhorar o desempenho exigido, no entanto, o teste final do desempenho da câmera está no aplicativo atual.
Comparando um CCD tradicional com um sensor CMOS moderno
Agora vamos comparar o desempenho de um sensor CCD tradicional com um sensor CMOS moderno em condições de imagem com pouca luz e em uma cena com uma ampla gama de condições de iluminação.
Na seção anterior, mostramos que uma câmera com o Sony ICX414, um CCD de ½" com resolução VGA, funciona melhor em condições de pouca luz do que uma câmera com o CCD de ¼’’ com resolução VGA ICX618 da Sony. Agora, vamos comparar o CCD de ½’’ com resolução VGA com o novo sensor CMOS de obturador global Sony Pregius IMX249, 1/1.2" 2.3Mpix.
À primeira vista, isso pode parecer comparar "maçãs e laranjas”, entretanto, o custo das câmeras com esses dois sensores é comparável a aproximadamente 400 €, uma região VGA de interesse na câmera CMOS é na verdade mais próxima do tamanho óptico da câmera. A câmera de ¼’’ e as taxas de quadros também são semelhantes na resolução VGA.
Os dados do EMVA 1288 para as câmeras mostram que o sensor CMOS IMX249 possui eficiência quântica significativamente melhor, menor ruído e maior capacidade de saturação. Por outro lado, o sensor CCD ICX414 possui pixel maior, que foi o parâmetro crítico no exemplo apresentado no artigo anterior.
| Sensor de | câmera | Tamanho do pixel (μm) | Eficiência quântica (%) | Ruído temporal de corrente de escuro (e-) | Capacidade de saturação (e-) |
| Câmera CCD de 1/2" (BFLY-PGE-03S3M-C) | ICX414 | 9,9 | 39 | 19,43 | 25,949 |
| Câmera CMOS de 1/1,2" (BFLY-PGE-23S6M-C) | IMX249 | 5,86 | 80 | 7.11 | 33,105 |
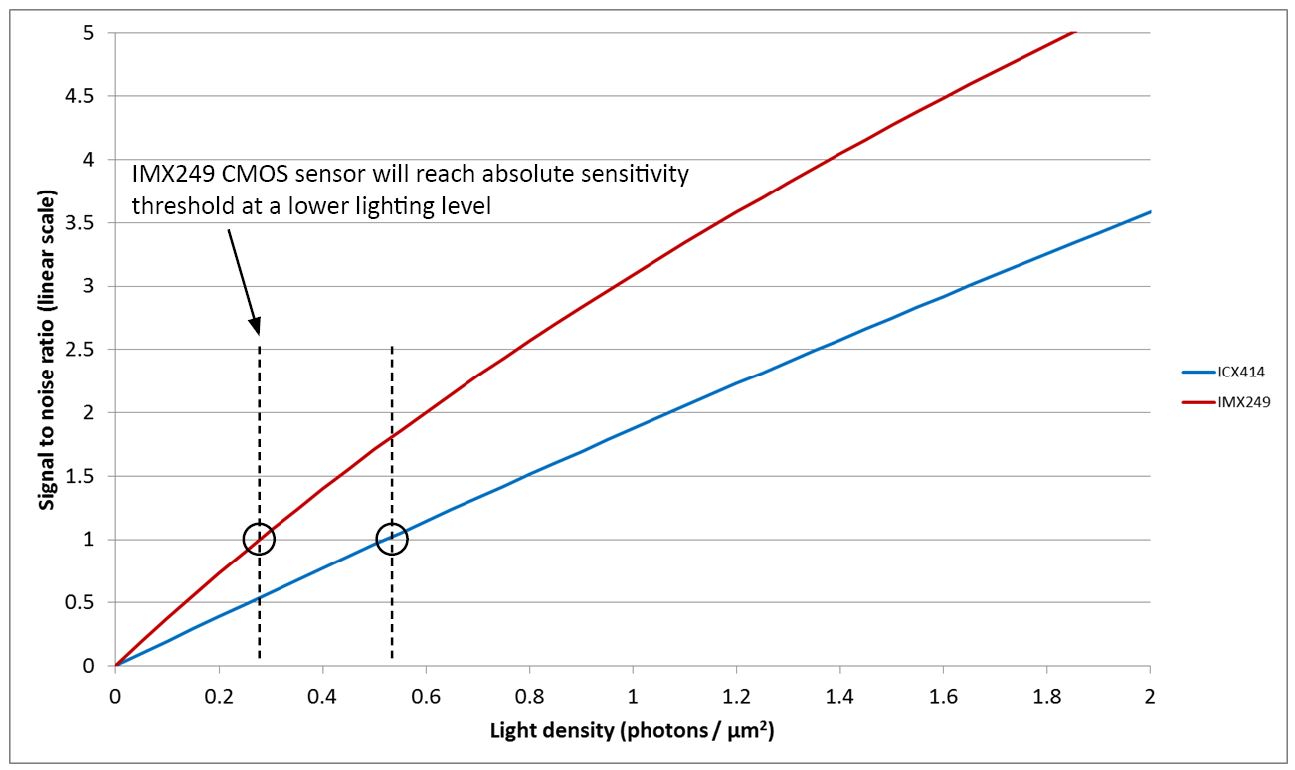
Figura 6: Taxa de sinal/ruído dos sensores ICX414 CCD e IMX249 CMOS em níveis de luz baixos
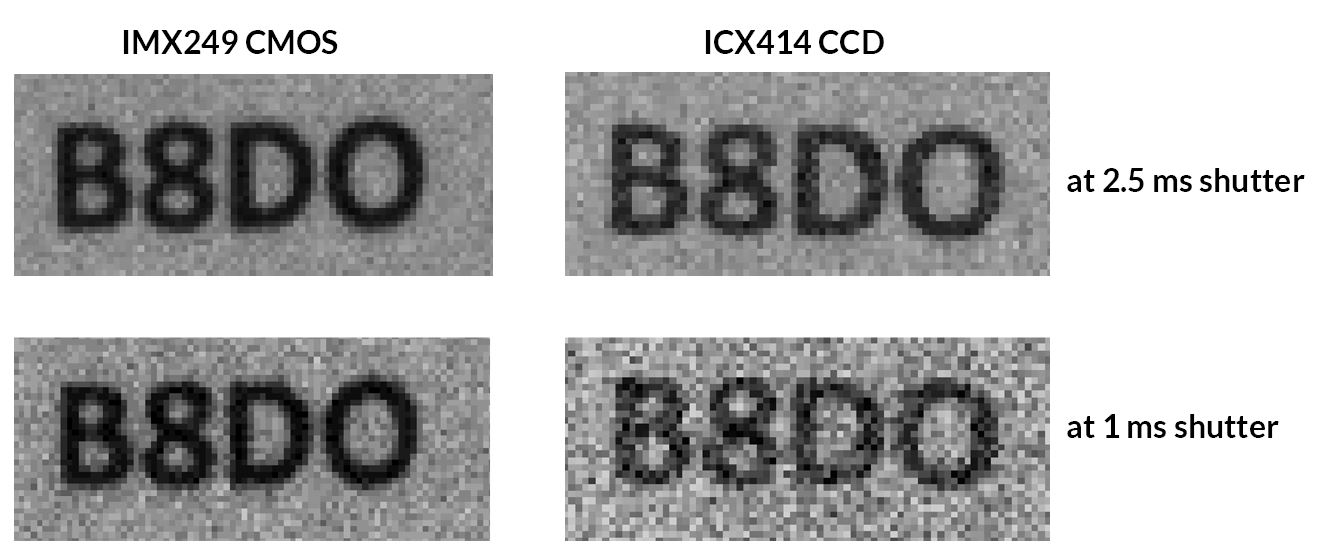
Figura 7: Resultados obtidos a partir dos sensores ICX414 CCD e IMX249 CMOS em diferentes tempos de exposição
A comparação mais interessante é em intensidades de luz mais altas devido à diferença na capacidade de saturação entre os dois sensores. A Figura 8 mostra o sinal como uma função da intensidade da luz em toda a faixa de intensidades de luz. A partir do gráfico, pode-se observar que o sensor ICX414 atingirá a capacidade de saturação em cerca de 700 fótons/µm2, enquanto que o sensor CMOS IMX249 saturará a mais de 1200 fótons/µm2.
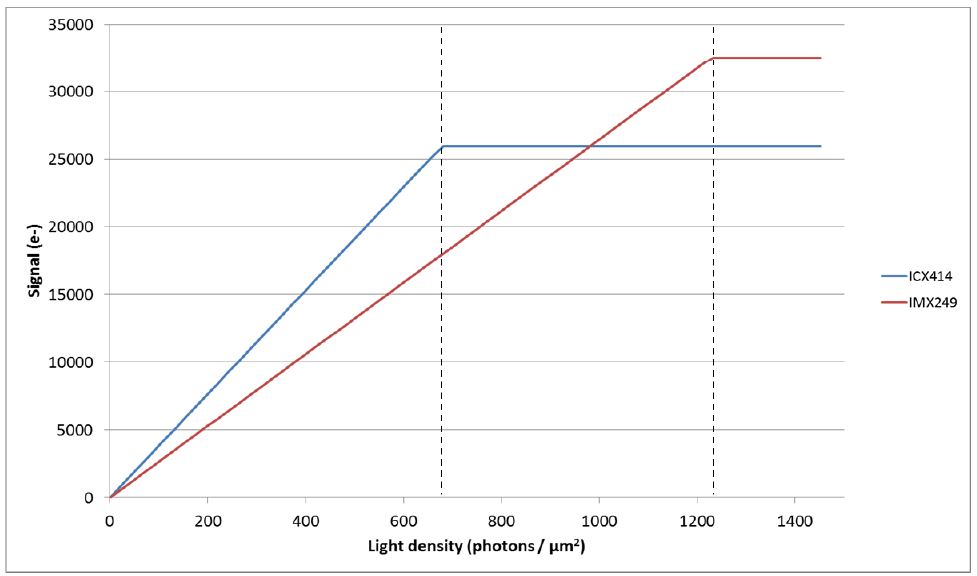
Figura 8: Sinal produzido pelo sensor ICX414 CCD e CMOS IMX249 em função do nível de luz.
A primeira conclusão que pode ser feita é que a imagem produzida pelo sensor CCD ICX414 será mais brilhante do que a imagem produzida pelo sensor CMOS IMX249. Se isso não for óbvio pelo gráfico, considere a imagem que seria produzida em cerca de 700 fótons/µm2. No caso do sensor ICX414 CCD, a imagem deveria estar nos mais altos níveis de escala de cinza, provavelmente saturada, enquanto o sensor IMX249 CMOS produziria uma imagem apenas 50% maior do brilho máximo. Essa observação é significativa porque uma abordagem ingênua para avaliar a sensibilidade da câmera é observar o brilho da imagem. Em outras palavras, a suposição é que uma imagem mais clara virá de uma câmera com melhor desempenho. Isso, no entanto, não é verdade e neste exemplo é o oposto; a câmera que produz imagens mais escuras, na verdade, tem melhor desempenho.
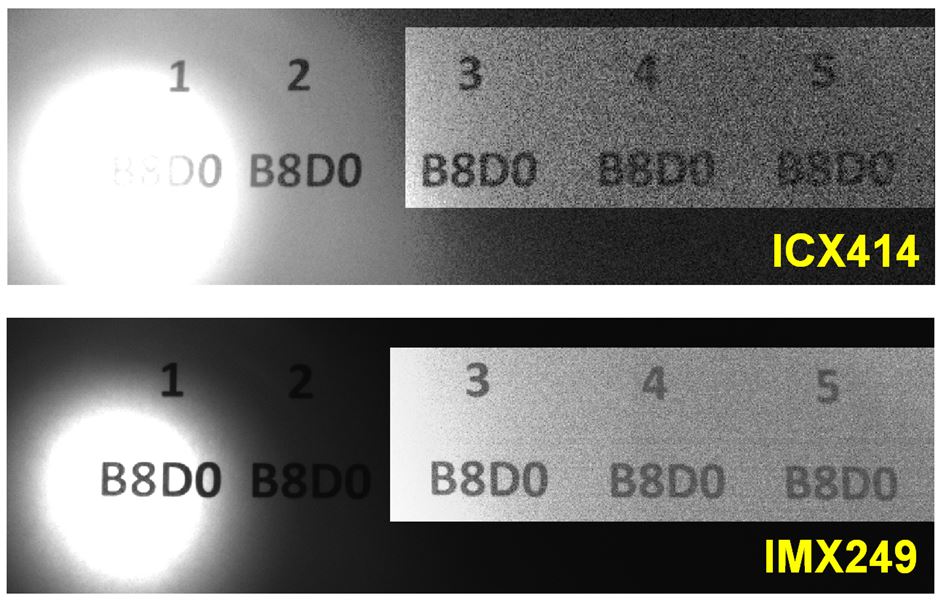
Figura 9: Resultados obtidos com os sensores ICX414 CCD e IMX249 CMOS em condições de iluminação difíceis.
A segunda observação é que o sensor CMOS IMX249 produzirá imagens úteis para o processamento de imagens em uma ampla gama de condições de iluminação. A Figura 9 mostra a mesma cena gravada pelas duas câmeras. Deve-se notar que a parte mais escura das imagens foi aprimorada para fins de exibição, no entanto, os dados subjacentes não foram modificados. A partir das imagens, pode-se observar que o CCD ICX414 está saturado nas áreas claras da cena, enquanto que, ao mesmo tempo, há muito ruído nas áreas escuras para que os caracteres fiquem legíveis. Por outro lado, o sensor CMOS IMX249 está produzindo caracteres legíveis nas partes claras e escuras da cena.
Finalmente, podemos concluir que a recente tecnologia CMOS de obturador global se tornou uma alternativa viável aos CCDs em aplicações de visão de máquina. Não apenas os sensores são mais baratos, têm taxas de quadros mais altas em resoluções equivalentes e não têm artefatos como manchas e florescência, mas também estão excedendo o desempenho de imagem dos CCDs.
Comparando gerações de Sony Pregius
Como vimos na seção anterior, o tamanho do sensor afeta bastante seu desempenho devido ao fato de que pixels maiores permitem que um número de fótons maior seja coletado, bem como que mais fótons sejam coletados sob a mesma condição de iluminação. A desvantagem de ter um tamanho de pixel maior é que o tamanho do sensor também terá que ser maior para acomodar uma determinada resolução em comparação com o uso de um sensor com tamanho de pixel menor, o que aumenta o custo do sensor. A figura abaixo mostra como o tamanho do pixel mudou entre as diferentes gerações de sensores Sony Pregius.
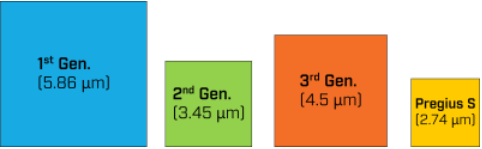
Figura 10: Diferenças de tamanho de pixel entre diferentes gerações de sensores Sony Pregius
Apesar da tendência de queda do tamanho do pixel (ao lado da 3ª geração do sensor), o desempenho de imagem do sensor aumentou, exceto pela capacidade do sensor, a cada geração. A principal razão para o desempenho de imagem aprimorado é o baixo ruído escuro temporal do sensor encontrado a partir da 2ª geração. A figura abaixo descreve como o ruído escuro temporal do sensor progrediu através das diferentes gerações do sensor Pregius
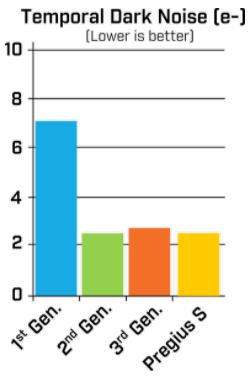
Figura 11: O Pregius S mantém um baixo nível de ruído de leitura
Para obter uma visão completa do desempenho de imagem do sensor, consulte a tabela abaixo para ver as especificações do sensor representativo de cada geração de Pregius.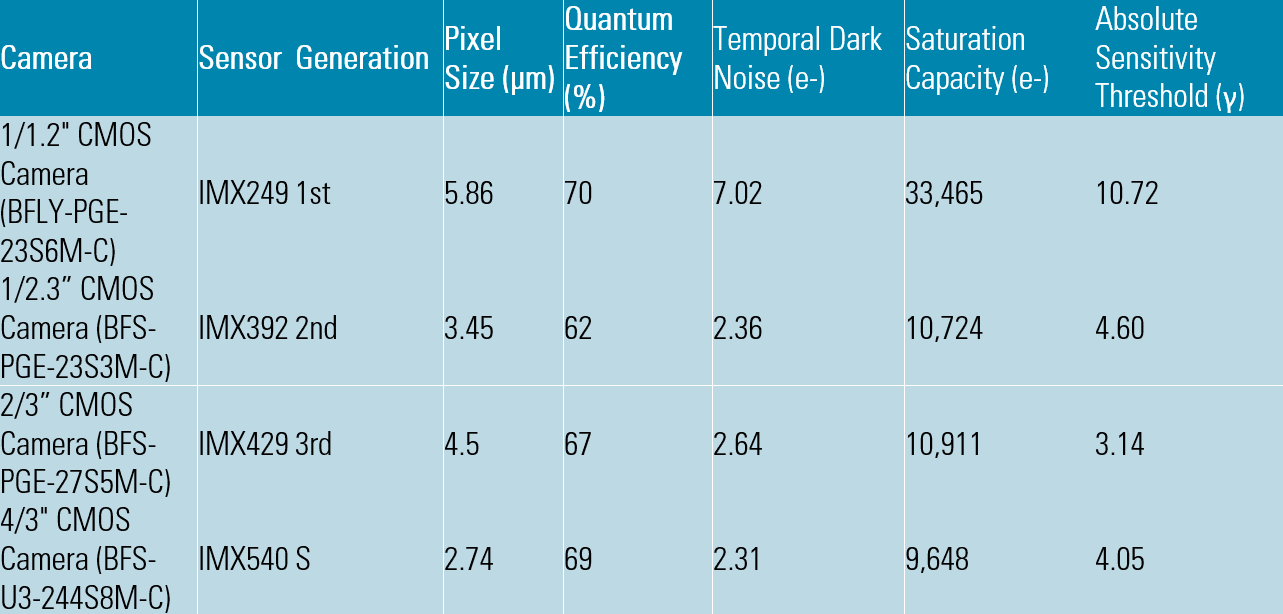
Ao observar a tabela acima, é possível notar que, apesar de ter o menor tamanho de pixel, o desempenho de imagem do sensor Pregius S é comparável aos sensores de 2ª e 3ª geração. Isso se deve ao design retroiluminado do sensor que permite um ângulo mais amplo de entrada para fótons, o que ajuda a capturar mais luz no pixel.
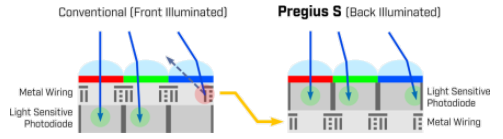
Figura 12: Os sensores BSI invertem o design do sensor iluminado frontal tradicional, tornando mais fácil para os fótons entrarem no fotodiodo sensível à luz de cada pixel
Este novo design de sensor permite que a família de sensores Pregius S mantenha o desempenho de imagem das gerações anteriores enquanto utiliza o menor pixel disponível até o momento, resultando em sensores de resolução mais alta com preços relativamente baixos.
Conclusão
Neste ensaio aprendemos os conceitos-chave usados na avaliação de desempenho de uma câmera. Introduzimos o padrão EMVA1288 e aplicamos os resultados para comparar o desempenho da câmera sob uma variedade de condições de iluminação. Ainda há muitos outros aspectos do desempenho da câmera que podem ser considerados ao avaliá-las. Por exemplo, a eficiência quântica muda drasticamente em diferentes comprimentos de onda, portanto, uma câmera que tenha bom desempenho a 525nm pode não ter um desempenho tão bom quando a fonte de luz estiver próxima a frequências infravermelhas (NIR). Da mesma forma, tempos de exposição longos comuns à fluorescência e imagem astronômica precisam considerar os efeitos da corrente escura, um tipo de ruído que é importante em intensidades de luz baixas.
Não é fácil selecionar a câmera certa com base nas características de desempenho da imagem, mas esperamos que este artigo técnico tenha ajudado um pouco a dar sentido a essa assunto fascinante e complexo.
Filtre e classifique com mais de 14 especificações EMVA para encontrar exatamente o que corresponde aos requisitos do seu projeto – Experimente nosso novo seletor de câmera.
Veja mais sobre sistema de visão
Artigos Relacionados
-
 Estudo de Caso
Estudo de Caso
A empresa estabelecedora de novas tendências Land & Houses atrai importantes arrendatários com altos volumes de tráfego
Leia a História -
 Estudo de Caso
Estudo de Caso
Inovação tecnológica
Leia a História -
 Tecnologia de Sensores e Revisão
Tecnologia de Sensores e Revisão
Sensor CMOS com obturador global Sony Pregius® S
Leia a História