Inovação tecnológica
PIONEIROS DA VISÃO ESTÉREO DESDE 1997
Desde 1997, temos desenvolvido e fabricado sensores de visão estéreo 2D e 3D líderes da indústria. Inúmeras inovações foram feitas desde que lançamos o primeiro sensor de visão estéreo de mercado de massa do mundo. As melhorias com precisão, qualidade de imagem, calibração, tamanho e confiabilidade vêm do constante desenvolvimento de hardware e software. Nossa vasta experiência e compromisso com a qualidade nos permite integrar a tecnologia líder da indústria em produtos que duram além do ciclo de vida normal; com muitos sensores de primeira geração de rastreamento e contagem de pessoas ainda em uso e operando hoje!

A evolução da nossa tecnologia de visão estéreo desde 1997 (esquerda) até 2017 (direita)
VAMOS SER TÉCNICOS
A FLIR tornou a visão estéreo 3D a tecnologia de passos mais precisa e consistente, desenvolvendo pacotes inovadores de hardware e software que incluem suporte completo de processamento estéreo - desde correção de imagem e alinhamento até denso mapeamento estéreo baseado em correlação.
COMO FUNCIONA?
A visão estéreo 3D funciona de maneira semelhante ao sensor 3D na visão humana. Começa com a identificação de pixels da imagem que correspondem ao mesmo ponto em uma cena observada por várias câmeras. A posição 3D de um ponto pode, então, ser estabelecida por triangulação usando um raio de cada câmera. Quanto mais pixels correspondentes forem identificados, mais pontos 3D poderão ser determinados com um único conjunto de imagens. Os métodos estéreo de correlação tentam obter correspondências para cada pixel na imagem estéreo, resultando em dezenas de milhares de valores 3D gerados com cada imagem estéreo.

Cada sensor 3D está equipado com 2 câmeras.
Isso permite que o sensor calcule a profundidade 3D.
TUBO DE IMAGENS ESTÉREO 3D
COMO MANTEMOS A PRECISÃO: CALIBRAÇÃO E RETIFICAÇÃO
Todo e qualquer sensor FLIR Brickstream é calibrado de fábrica para distorção da lente e desalinhamentos do sensor para garantir a consistência da calibração em todos os sensores. Durante o processo de retificação, as linhas epipolares são alinhadas dentro do erro RMS de 0,05* pixels. A calibração e a retificação são fundamentais para obter imagens de disparidade de alta qualidade a partir de um sensor 3D e permitem a coleta de dados de passos consistentes e precisos entre os sensores. O design do sensor também é projetado especificamente para proteger a calibração contra choques mecânicos e vibrações. Abaixo está um fluxo de trabalho de tecnologia dos sensores FLIR Brickstream 3D para calcular imagens de altura estéreo 3D.

1) IMAGEM BRUTA
Imagens brutas são capturadas da câmera esquerda e direita no sensor. A distorção da lente menor cria um barramento das imagens.

2) IMAGEM RETIFICADA
O par de imagens é corrigido para remover a distorção da lente e alinhado horizontalmente entre si. As imagens agora têm linhas de perspectiva retas.

3) IMAGEM DE BORDA
O aprimoramento de borda é aplicado para criar imagens de borda que não são influenciadas pelo brilho da imagem.
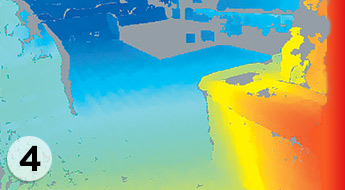
4) IMAGEM DE PROFUNDIDADE 3D
Para cada pixel na imagem da direita, um pixel correspondente na imagem da esquerda é obtido via correlação. (Colorido para mostrar profundidade)
A TECNOLOGIA DA VISÃO 3D DA FLIR ENTREGA
Artigos Relacionados
-
 Estudo de Caso
Estudo de Caso
A empresa estabelecedora de novas tendências Land & Houses atrai importantes arrendatários com altos volumes de tráfego
Leia a História -
 Tecnologia de Sensores e Revisão
Tecnologia de Sensores e Revisão
Sensor CMOS com obturador global Sony Pregius® S
Leia a História -
 Instruções
Instruções
Sete maneiras de garantir o sucesso ao escolher câmeras para sistemas de transporte inteligentes
Saiba mais