Robô guiado pela visão corta plantas de tomateiros com o Chameleon3
A remoção das folhas das plantas de tomateiros é um procedimento relativamente simples que tradicionalmente envolvia cortar de forma manual as folhas mais antigas da parte inferior das hastes. O processo é realizado semanalmente em plantações de tomates cultivadas comercialmente para promover o amadurecimento dos tomates. No entanto, a imprevisibilidade e alto custo do trabalho manual envolvido no processo, bem como a dificuldade de encontrar profissionais motivados para realizar esta tarefa monótona, levaram recentemente um consórcio de produtores comerciais de tomate na Holanda a unir forças com os especialistas em automação da Priva para criarem uma solução alternativa. O resultado de seus esforços culminou com o desenvolvimento e otimização de um robô que oferece aos produtores de tomate uma alternativa economicamente viável ao corte manual das folhas das plantações de tomates cultivados em estufas.
De acordo com o Dr. Tomas de Boer, engenheiro de projeto mecatrônico da equipe de desenvolvimento da Priva e responsável pelo design do sistema, o robô Kompano Deleaf-Line percorre os trilhos das passagens existentes nas áreas da estufa, que é preenchida com plantas de tomateiros espaçadas em intervalos em ambos os lados dos trilhos (Figura 1). O robô, equipado com um sistema de visão e um cortador telescópico, move-se de planta em planta de forma sequencial, identificando e removendo as folhas de cada uma.

Figura 1: O robô Kompano Deleaf-line percorre os trilhos das passagens existentes nas áreas da estufa, que é preenchida com plantas de tomateiros espaçadas em intervalos em ambos os lados dos trilhos. O robô, equipado com um sistema de visão e um cortador telescópico, move-se de planta em planta de forma sequencial, identificando e removendo as folhas de cada uma.
Desafios de design
Durante o desenvolvimento do sistema, os engenheiros da Priva precisavam garantir que o sistema robótico baseado em visão pudesse funcionar continuamente durante o dia e a noite em condições ambientais desafiadoras encontradas em estufas comerciais. Portanto, o sistema precisava ser capaz de identificar pequenos pecíolos de folhas verdes - ou os caules que prendem lâminas de folhas de tomate a seus caules - em uma infinidade de outras folhas verdes, e operar sob uma variedade de condições de iluminação, variando de luz solar intensa ou luz artificial até completa ausência de luz durante a noite.
Para solucionar esses desafios, os desenvolvedores optaram por desenvolver o sistema de visão em torno de um par de câmeras estereoscópicas montadas em uma plataforma móvel, juntamente com um braço de corte telescópico. As câmeras estéreo - que foram desenvolvidas sob medida a partir de dois pares de câmeras Chameleon3 com sensores Python com resolução OnSemi 1280 x 1024 - capturam um amplo campo de visão do lado esquerdo e direito de cada planta de tomateiros. (Figura 2).
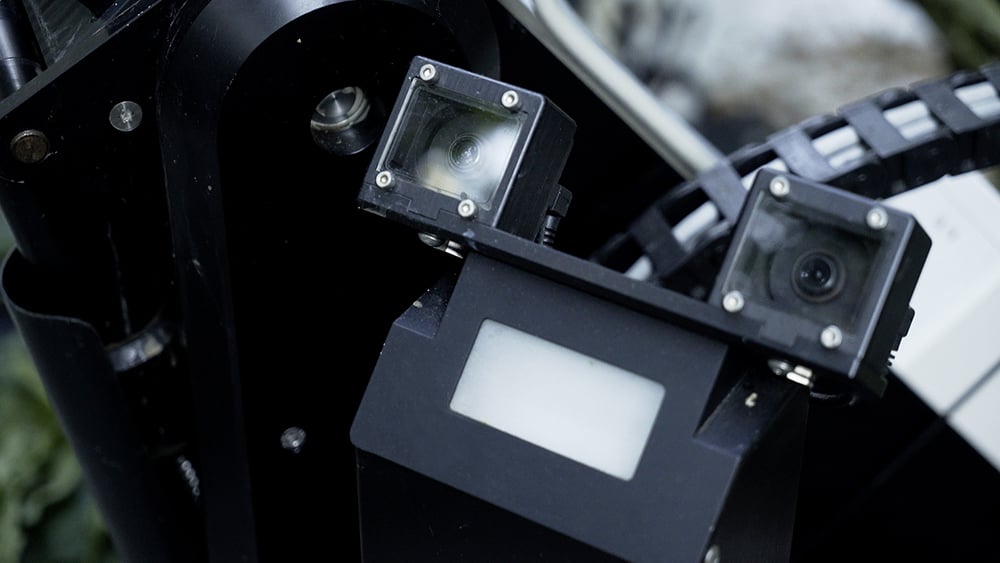
Figura 2: O sistema de visão para uso do robô utiliza um par de câmeras estereoscópicas montadas em uma plataforma móvel, juntamente com um braço de corte telescópico. As câmeras estéreo - que foram desenvolvidas sob medida a partir de dois pares de câmeras Chameleon 3 com sensores Python OnSemi com resolução de 1280 x 1024 - capturam um amplo campo de visão do lado esquerdo e direito de cada uma das plantas de tomateiros.
"Para permitir que cada par de câmeras estéreo capture imagens confiáveis nos pés de tomateiros independentemente das condições de iluminação da estufa, o sistema emprega uma luz estroboscópica de Xenônio que ilumina a planta. Como o estroboscópio emite luz a cada dois segundos, ele aciona as câmeras estéreo para expor imagens em intervalos de 30 microssegundos. Isso permite que o sistema capture um conjunto uniforme de imagens de cada vez", afirmou o Dr. de Boer.
Após as duas câmeras estéreo capturarem algumas imagens, estas são transferidas através de uma interface USB para um PC executando-se o sistema operacional Ubuntu de código aberto e o Sistema Operacional de Robôs (ROS), uma estrutura de software de código aberto hospedada pelo Open Source Robotics. Foundation, Inc. (OSRF) para criar aplicativos robóticos em várias plataformas.
Software do sistema
As funções de processamento de imagens sob medida dentro do OpenCV são utilizadas para processar as imagens de ambos os conjuntos de câmeras e identificar a localização das folhas nas plantas de tomateiros em uma determinada faixa de altura previamente definida pelos produtores de tomate. Após identificar a localização das folhas, o software de processamento de imagens calcula as coordenadas tridimensionais exatas de seus pecíolos, que precisam ser cortados pelo efetor localizado no final do braço robótico.
Os dados coordenados gerados pelo software de processamento de imagens são transmitidos para o Sistema Operacional de Robôs (ROS), que transfere os dados para um conjunto de servomotores inteligentes que alimentam os motores que orientam o braço robótico telescópico até o local correto na planta. Quando alcança o seu destino, o efetor final corta os pecíolos removendo as folhas do tomateiro (Figura 3).
Como o par de câmeras estéreo está montado na mesma plataforma que o braço robótico, quando o braço se move para cortar um conjunto específico de pecíolos, as câmeras também são movidas para um novo local, onde capturam mais um conjunto de imagens da planta a partir de uma perspectiva diferente.
"Essas novas imagens são processadas em paralelo durante a operação de corte para identificar quaisquer outras folhas que precisem ser removidas da planta em qualquer operação subsequente. O procedimento iterativo continua até que o sistema não possa detectar a necessidade de remoção de nenhuma folha adicional da planta. Após realizar uma verificação final, a operação de corte cessa e o robô se move ao longo dos trilhos até a próxima planta na estufa", afirmou o Dr. de Boer.

Figura 3: Quando a localização dos pecíolos no tomateiro tiver sido determinada pelo software de processamento de imagens, os dados serão usados para conduzir o braço robótico telescópico do robô para a localização correta. Quando alcança o seu destino, o efetor final corta os pecíolos removendo as folhas (Figura 3).
Toques finais
No momento, os desenvolvedores do robô Kompano Deleaf-Line estão trabalhando com membros do consórcio produtor de tomate na Holanda para finalizar um protótipo de pré-produção do sistema.
Esses membros que trabalharam com a Priva serão os primeiros a se beneficiarem do sistema quando ele finalmente estiver disponível no início do próximo ano. Dependendo do número de robôs encomendados pelo consórcio, ele ficará disponível para outros produtores de tomate a partir de junho de 2017. A partir de junho desse ano, também será possível pré-encomendar o robô on-line.
Em atividade, espera-se que o robô de desbastamento seja capaz de manter 0,75 a 1 hectare de tomateiros, dependendo da densidade das folhas em suas hastes. Em instalações maiores, os produtores podem optar por trabalhar com vários robôs ou combinar o sistema automatizado com o trabalho manual.
De acordo com o Dr. de Boer, o robô para corte de folhas de tomate será o primeiro de muitos robôs que a empresa planeja desenvolver para o mercado de horticultura. Esses sistemas de próxima geração automatizarão outras tarefas de trabalho intensivo, como a colheita de vegetais como pepinos.
Sobre o grupo Priva
A empresa Priva cria um ambiente para o crescimento. A empresa é líder no desenvolvimento e produção de tecnologia para otimização das condições ambientais e gestão de processos. A Priva fornece soluções para horticultura, automação predial e serviços relacionados com uma combinação única de software, hardware e serviços.
www.privagroup.com
Artigos Relacionados
-
 Estudo de Caso
Estudo de Caso
A empresa estabelecedora de novas tendências Land & Houses atrai importantes arrendatários com altos volumes de tráfego
Leia a História -
 Estudo de Caso
Estudo de Caso
Inovação tecnológica
Leia a História -
 Tecnologia de Sensores e Revisão
Tecnologia de Sensores e Revisão
Sensor CMOS com obturador global Sony Pregius® S
Leia a História