Edge computing
DESAFIO: O uso do processamento de imagens baseado na nuvem pode aumentar a latência e o tráfego de rede. Também pode representar riscos à segurança e à privacidade.
Solução:
Processar dados de imagem na origem e transformá-los em informações úteis usando a edge computing. A FLIR pode ajudar com câmeras que oferecem:
• Captura de imagens confiável e detalhada em condições desafiadoras
• Compatibilidade com IEEE 1588 para fácil sincronização da câmera
• Suporte SDK completo para ARM e plataforma de x64s
Edge Computing em sistemas integrados com câmeras FLIR
A Introdução rápida da Edge Computing
Edge computing é um modelo de rede no qual o processamento de dados ocorre na borda da rede, próximo da fonte de dados. A edge computing pode eliminar a necessidade de enviar imagens para um servidor central ou serviço na nuvem para processamento. Por exemplo, se a edge computing for usada para cobrança de pedágio, ela permitiria que o sistema executasse o reconhecimento da placa do veículo em um computador de placa simples com baixa potência perto da câmera. Somente os números de placas seriam transmitidos, não as imagens inteiras dos veículos na estrada. Agora isso é possível com computadores de placa única acessíveis e potentes. O Spinnaker SDK da FLIR é compatível com hardware x64 e ARM, bem como com bibliotecas de visão de terceiros, assim você não precisa se preocupar com compatibilidade. O suporte interplataformas significa que é fácil desenvolver aplicativos em um ambiente de computador familiar e, em seguida, implantá-los nos sistemas integrados.
Principais benefícios da edge computing
O processamento de dados de imagens na borda diminui a latência do sistema e as flutuações diminuindo o número de comutadores e hosts entre a origem e o destino dos dados. Cada nó de rede em que os pacotes de dados passam aumenta o atraso entre a aquisição da imagem e a ação. A edge computing reduz a latência do sistema eliminando ainda mais o atraso causado pelo tempo necessário para carregar dados de imagem. Para aperfeiçoar a segurança do sistema e mitigar as preocupações com privacidade, os nós da borda podem anonimizar os dados enviados para a nuvem para análise posterior.
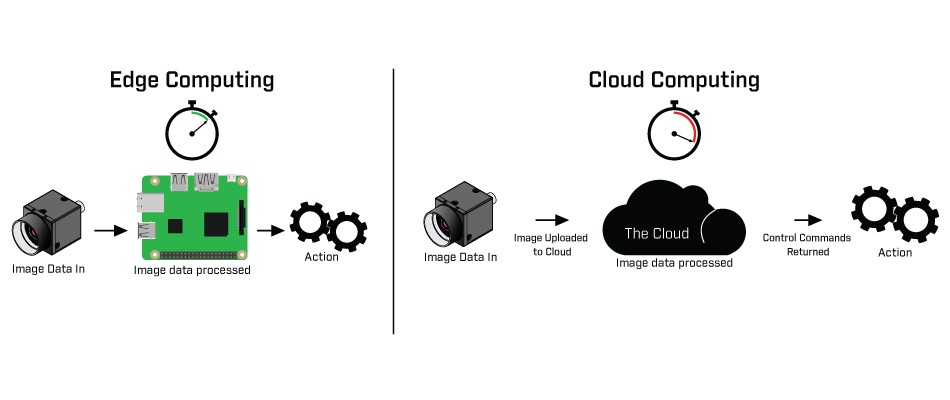
Figura 1: A edge computing processa os dados de imagens próximo da fonte para baixa latência do sistema
Figura 2: A cloud computing resulta em uma trajetória de sinal longo para dados de imagem que aumenta a latência do sistema
| Redução da largura de banda | O processamento de seus dados na origem elimina a necessidade de transmitir as imagens de volta para um servidor central. Como somente as informações úteis estão sendo enviadas, muito menos largura de banda é necessária. |
| Reduzir a latência | A redução da quantidade de dados enviados para longe da borda acelera o sistema e minimiza os atrasos entre as imagens sendo capturadas e as informações recebidas. |
| Melhorar a privacidade e a segurança | Informações confidenciais, como placas de veículos e rostos, não são transmitidas para a nuvem. |
Quando usar a edge computing
O uso de redes descentralizadas de edge computing para processar o volume cada vez maior de dados gerados pela Internet das Coisas é chamado ocasionalmente de Fog Computing (computação em névoa). No modelo de fog computing, a computação na nuvem não é eliminada, mas seu papel no sistema muda. Os nós da borda são usados para a comunicação de baixa latência entre máquinas, enquanto a nuvem é usada para análises de dados mais complexas, como as que abrangem uma área geográfica ampla ou uma escala de tempo mais longa.
Uma decisão que precisa ser tomada ao projetar um sistema de edge computing é sobre quais dados passar para a nuvem para análise posterior ou armazenamento de longo prazo. As informações que são necessárias em escalas de tempo de até poucos segundos devem ser processadas e utilizadas na borda, enquanto as informações de análise de dados em escalas de tempo mais longas podem ser enviadas à nuvem sem penalidade de latência para o sistema.
| Aplicação | Vantagem |
| Sistemas de tráfego inteligentes | Menor consumo de largura de banda, aumento da segurança do sistema e minimização dos riscos de privacidade |
| Automação industrial | Menor latência e flutuação para permitir maior transferência de dados |
| Direção de veículos autônomos | Minimizar a latência do sistema para permitir a rápida tomada de decisão em veículos de alta velocidade e, ao mesmo tempo, eliminar a dependência de uma conexão de dados sempre ativa |
Câmeras de visão de máquina FLIR compatíveis com edge computing
As câmeras FLIR simplificam o desenvolvimento de aplicações de visão para a borda. Ao emparelhar os mais recentes sensores CMOS com algoritmos avançados de controle automático para correção de cor e exposição, as câmeras FLIR capturam, de maneira confiável, imagens detalhadas em condições de luminosidade desafiadoras. As câmeras FLIR Blackfly S apresentam sensores Pregius da Sony. Sua alta eficiência quântica e baixo ruído de leitura permitem que esses sensores capturem imagens claras de baixo ruído em pouca luminosidade. O intervalo dinâmico amplo garante que os detalhes sejam capturados tanto em regiões sombreadas quanto brilhantes de cenas de alto contraste.

As câmeras FLIR têm um processamento potente de imagens na placa, incluindo interpolação de cores, aumento da nitidez e correção de gama, o que reduz os requisitos de processamento no lado do host. O suporte para o protocolo de horário de precisão IEEE 1588 facilita a sincronização com o GigE Blackfly S com uma base comum de horário em outros dispositivos com recursos de IEEE 1588.
Compatibilidade com Spinnaker SDK
Com suporte para sistemas baseados em x64 e ARM, as câmeras FLIR com tecnologia do Spinnaker SDK podem ser implantadas em uma ampla variedade de hardware pronto para uso. O suporte interplataformas oferece uma experiência de usuário consistente no Windows e no Linux x64.
| ARM64 | x64 | |
| Windows 7/8/10 | Não | Sim |
| Ubuntu 14.01/16.04 | Sim | Sim |
| LinuxGUI | Não | Sim |
Mais recursos úteis
Caso queira comparar o desempenho da captura de imagens do EMVA 1288 de nossas câmeras, acesse a página online da nossa ferramenta de comparação de sensores e seletor de câmeras.
Para definições de termos de desempenho da captura de imagens do EMVA 1288, como eficiência quântica e intervalo dinâmico, visite nossa visão geral do EMVA 1288.
Artigos Relacionados
-
 Estudo de Caso
Estudo de Caso
A empresa estabelecedora de novas tendências Land & Houses atrai importantes arrendatários com altos volumes de tráfego
Leia a História -
 Estudo de Caso
Estudo de Caso
Inovação tecnológica
Leia a História -
 Tecnologia de Sensores e Revisão
Tecnologia de Sensores e Revisão
Sensor CMOS com obturador global Sony Pregius® S
Leia a História