Precisão e Incerteza da Câmera de Infravermelho em Linguagem Simples

Não é fácil confiar em medições de instrumentos quando você não tem um entendimento claro de como se obtém sua sensibilidade e precisão. Muitas vezes, as câmeras de infravermelho estão incluídas nesta categoria. Além disso, debates sobre a precisão da medição da câmera de infravermelho costumam envolver termos complexos e jargão que pode ser confuso e enganador. Isso pode acabar por levar alguns pesquisadores a evitarem por completo essas ferramentas. Porém, ao fazerem isso, eles perdem as vantagens em potencial da medição termográfica para aplicações de P&D. Na discussão a seguir, esclarecemos os termos técnicos e explicamos a incerteza das medições em linguagem simples, fornecendo-lhe uma base que o ajudará a compreender a calibração e precisão das câmeras de IV.
Especificações de Precisão de Câmeras e a Equação de Incerteza
Você perceberá que as fichas de dados da maioria das câmeras de IV mostram uma especificação de precisão como ±2 °C ou 2% da leitura. Esta especificação é o resultado de uma técnica de análise de incerteza amplamente utilizada denominada “Raiz da Soma dos Quadrados”, ou RSS (Root‐Sum‐of‐Squares). A ideia é calcular os erros parciais de cada variável da equação de medição de temperatura, elevar ao quadrado cada termo do erro, somá-los todos e extrair a raiz quadrada da soma. Embora essa equação pareça complexa, na realidade ela é bem simples. Por outro lado, determinar os erros parciais pode ser complicado.
“Erros parciais” podem resultar de uma de muitas variáveis na equação de medição de temperatura da câmera de IV típica, inclusive:
- Emissividade
- Temperatura ambiente refletida
- Transmitância
- Temperatura da atmosfera
- Resposta da câmera
- Precisão de temperatura do calibrador (corpo negro)
Quando estiverem determinados valores razoáveis para os “erros parciais” de cada um dos termos acima, a equação de erro geral se parecerá com isso:
![]()
Onde ΔT1, ΔT2, ΔT3, etc., são os erros parciais das variáveis na equação de medição.
Por que fazer isso? Acontece que, por vezes, os erros aleatórios se acumulam na mesma direção, afastando-o do valor real, enquanto que em outras vezes eles se acumulam na direção oposta e se anulam uns aos outros. Aplicar a técnica RSS fornece-lhe um valor que é mais apropriado para uma especificação de erro geral. Historicamente, essa tem sido a especificação apresentada nas fichas de dados das câmeras da FLIR.
Vale a pena mencionar que os cálculos discutidos até aqui somente são válidos se a câmera estiver sendo utilizada no laboratório ou a curta distância (menos de 20 metros) ao ar livre. Distâncias mais longas introduzirão incerteza na medição devido à absorção atmosférica e, em menor escala, à sua emissão. Quando um engenheiro de P&D de câmeras efetua uma análise de RSS para praticamente qualquer sistema de câmera de IV sob condições de laboratório, o número resultante é de cerca de ±2 °C ou 2% – tornando essa uma classificação de precisão razoável para uso em especificações de câmeras.
Porém, a prática mostra-nos que câmeras de alto desempenho, como a FLIR X6900sc, oferecem resultados muito melhores que os de câmeras econômicas, como a FLIR E40, então ainda temos algum trabalho a fazer para explicar melhor essa observação.
Medições de Laboratório e Precisão de ±1 °C ou 1%
Nesta seção, analisamos as medições de temperatura que uma câmera realmente produz ao visar um objeto de emissividade e temperatura conhecidas. Tal objeto normalmente é referido como sendo um “corpo negro”. Você pode ter ouvido este termo antes em referência ao conceito teórico de um objeto com emissividade e temperatura conhecidas. Este termo também é utilizado para descrever equipamento de laboratório que emula de perto esse conceito. É mostrado abaixo o laboratório de calibração da FLIR com um quarto de círculo de ao menos 2 corpos negros de cavidade.

Medições de laboratório de incertezas envolvem apontar uma câmera calibrada para um corpo negro calibrado e plotar a temperatura ao longo de um período de tempo. Apesar das calibrações cuidadosas, sempre haverá algum erro aleatório na medição. O conjunto de dados resultante pode ser quantificado quanto a precisão e exatidão. A Figura 2, abaixo, demonstra os resultados da medição do corpo negro calibrado.
A plotagem abaixo mostra mais de duas horas de dados de uma câmera FLIR A325sc visando um corpo negro a 37 °C à distância de 0,3 metro em um ambiente fechado. A câmera gravou a temperatura uma vez por segundo. Os dados plotados são a média de todos os pixels na imagem. Um histograma desses dados tornaria isso mais claro, mas a maioria dos pontos de dados ficou entre 36,8 °C e 37 °C. As temperaturas com maiores variações registradas foram de 36,6 °C e 37,2 °C.

Analisando esses dados, seria tentador alegar uma precisão esperada de 0,5 °C para a média de todos os pixels. Alguém poderia até mesmo alegar ±1 °C para a FLIR A325sc e qualquer outra câmera que utilize o mesmo detector. Porém, alguém também poderia argumentar que o gráfico acima mostra uma média de todos os pixels, podendo não ser representativo de um pixel individual.
Uma forma de saber quão bem todos os pixels concordam uns com os outros é analisar o desvio padrão em relação ao tempo. Esse é representado na Figura 3. O gráfico mostra que o desvio padrão típico é menor que 0,1 °C. Os picos ocasionais para cerca de 0,2 °C são resultado do ajuste de 1 ponto da câmera, um tipo de procedimento de calibração automática que todas as câmeras baseadas em microbolômetro devem efetuar periodicamente.
Até o momento, discutimos a coleta de dados de câmeras de microbolômetro não refrigerado. Como esses resultados iriam diferir para uma câmera de alto desempenho com detector quântico?

A Figura 4 mostra a resposta de uma câmera de 3‐5 μm típica com um detector de Antimoneto de Índio (InSb), como a FLIR X6900sc. A documentação dessa câmera mostra a precisão testada a ±2 °C ou 2%. No gráfico abaixo, pode-se ver os resultados se enquadrarem bem nessas especificações: a leitura de precisão naquele dia ficou em cerca de 0,3 °C e a leitura de exatidão ficou em cerca de 0,1 °C. Porém, por que o erro de offset está em 0,3 °C? Isso pode ser causado pela calibração do corpo negro, a calibração da câmera ou quaisquer dos termos de erro parciais mencionados na seção 2. Outra possibilidade é que a câmera estava simplesmente aquecendo no início da medição. Se os elementos ópticos ou o interior do corpo da câmera estiverem mudando de temperatura, podem provocar o offset da medição de temperatura.
A conclusão que podemos tirar desses dois testes de calibração é que tanto as câmeras com microbolômetro quanto as câmeras com detector de contagem quântica de fótons podem ser calibradas de fábrica para fornecer precisões de menos de 1 °C ao visarem objetos a 37 °C de emissividade conhecida sob condições ambientais típicas de recintos fechados.

Compensação de Temperatura Ambiente
Um dos passos mais críticos nas calibrações de fábrica é a compensação de temperatura ambiente. Câmeras de infravermelho – sejam de detecção térmica ou quântica – respondem à energia infravermelha total que chega ao detector. Se a câmera for bem projetada, a maior parte dessa energia será da cena: muitos poucos resultados da câmera propriamente dita. Porém, é impossível eliminar completamente a contribuição dos materiais ao redor do detector e do caminho óptico Figura 2 – Resposta da câmera FLIR A325sc típica ao visar um corpo negro a 37 °C Figura 3 – Desvio Padrão de uma A325sc típica ao visar um corpo negro a 37 °C Figura 4– Resposta de uma câmera InSb típica ao visar um corpo negro a 35 °C. Sem uma compensação adequada, quaisquer mudanças na temperatura do corpo ou das lentes da câmera irão alterar significativamente as leituras de temperatura fornecidas pela câmera.
O melhor método para obter a compensação de temperatura ambiente é medir a temperatura da câmera e do caminho óptico em até três locais diferentes. Os dados de medição são então incluídos na equação de calibração. Isso pode assegurar leituras precisas ao longo de toda a faixa de temperaturas de operação (normalmente entre ‐15 ºC e 50 ºC). Isso é particularmente importante para câmeras que serão utilizadas ao ar livre ou que, de outra forma, fiquem sujeitas a oscilações de temperatura.
Mesmo com uma Compensação de Temperatura Ambiente, é importante permitir que a câmera aqueça completamente antes de efetuar medições importantes. Além disso, mantenha a câmera e os elementos ópticos afastados de luz solar direta ou de outras fontes de calor. A mudança da temperatura da câmera e dos elementos ópticos terá um efeito adverso sobre a incerteza da medição.
Devemos observar que nem todos os fabricantes de câmeras incluem a compensação de temperatura ambiente em seu processo de calibração. Por não compensarem corretamente a variação da temperatura ambiente, os dados dessas câmeras podem mostrar imprecisões significativas – chegando a 10 °C ou mais. Portanto, peça informações sobre as calibrações e o modo como são efetuadas antes de investir em uma câmera de IV.
Outras Considerações sobre Medições
Embora não diretamente relacionadas à calibração da câmera, considerações como emissividade e tamanho do ponto podem afetar a precisão da câmera. Uma configuração incorreta de emissividade ou condições de teste impróprias afetarão a capacidade da câmera medir corretamente o seu alvo.
A emissividade – ou a capacidade de um objeto emitir energia infravermelha ao invés de refleti-la – deve ser corretamente levada em conta. Isso significa dedicar tempo para determinar a emissividade do seu alvo e inserir essas informações na câmera. Também significa prestar atenção ao fato de o alvo ser completamente reflexivo e tomar medidas para solucionar essa questão (p.ex., revestir a superfície com tinta não reflexiva) antes de efetuar a medição. Todas as câmeras da FLIR permitem definir uma emissividade correta. Caso você cometa um erro, todos os softwares de P&D da FLIR permitem que se altere a emissividade durante a análise (visualização em tempo real ou após a análise). Isso normalmente pode ser feito em uma imagem inteira ou de região a região.
Outro fator a levar em conta é o tamanho do ponto, ou quanta área cada pixel abrange em seu alvo. Digamos que uma A325sc com uma lente padrão de 25 graus mede um fósforo aceso que está a 60 pés de distância. Cada pixel abrange aproximadamente uma área de uma polegada quadrada da cena total. Porém, uma cabeça de fósforo tem apenas cerca de 1/8 de polegada quadrada – muito menor que o pixel que a abrange. Praticamente toda a energia infravermelha que atinge o pixel vem na verdade da área atrás da brasa do fósforo. Apenas 1/64 da contribuição vem da brasa que pretendíamos medir. Se o fundo estiver à temperatura ambiente, a câmera irá reportar a temperatura da brasa muito abaixo da temperatura real.
A solução seria acoplar um elemento óptico telescópico à câmera ou simplesmente movê-la para mais perto do alvo. Qualquer dessas soluções aproximaria o tamanho do pixel de uma relação de 1:1 com a brasa. Caso desejemos a precisão de temperatura mais próxima do absoluto, devemos assegurar que o menor objeto de interesse se estenda totalmente sob uma grade de ao menos 10 x 10 pixels. Porém, mesmo considerar o tamanho do ponto como sendo de um único pixel ou de uma grade de 3 x 3 pixels o levará muito próximo de uma medição real.
Conclusão
Conforme vimos, a técnica de análise de incerteza RSS permite-nos determinar a precisão das câmeras de infravermelho, e que essas câmeras podem ter, no máximo, uma margem de erro de 2 °C. Com calibração e atenção corretas a fatores como temperatura ambiente, emissividade e tamanho do ponto, a margem de erro possível pode ser menor que 1 °C.
Uma observação final: as informações apresentadas neste ensaio foram redigidas primariamente tendo em mente câmeras de infravermelho calibradas em fábrica. Embora a física seja aplicável a calibrações de usuário, as ferramentas e métodos necessários para as calibrações de usuário variam conforme o sistema em discussão. Além disso, ser capaz de efetuar uma boa calibração de usuário permite-lhe efetuar uma análise de incerteza personalizada – tornando menos relevantes as especificações generalizadas discutidas neste ensaio.
Artigos Relacionados
-
 Caso de Aplicação
Caso de Aplicação
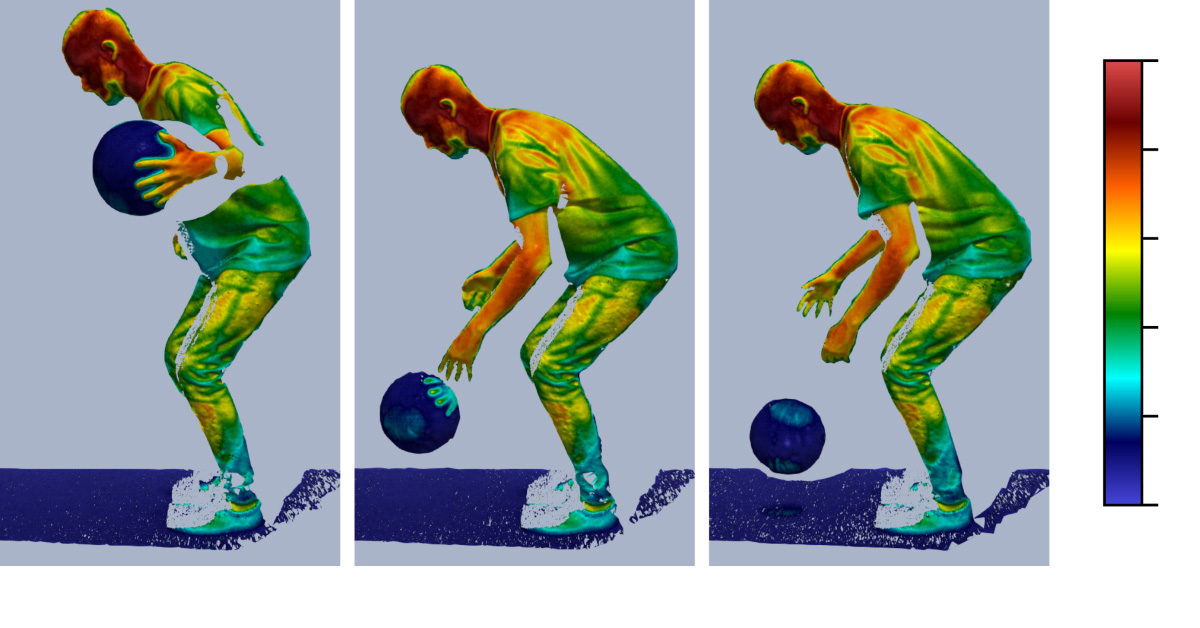
Termografia de alta velocidade combina dados espaciais dinâmicos 3D e dados térmicos
Leia a História -
 Estudo de Caso
Estudo de Caso
Clientes de P&D/Ciência Revelam como as Soluções da FLIR Reduzem os Tempos de Teste e Economizam Dinheiro
Leia a História -
 Estudo de Caso
Estudo de Caso
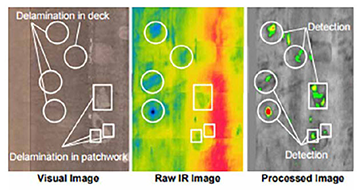
Varredura Infravermelha Móvel – Uma Alternativa de Alta Tecnologia e Precisa para os Métodos Tradicionais de Inspeção de Pontes
Leia a História